
偏导数
优化方程稀疏性的解释
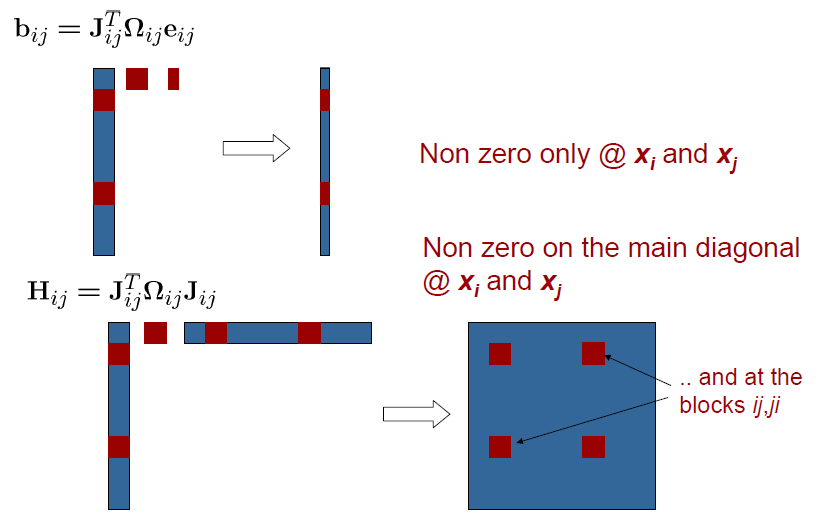
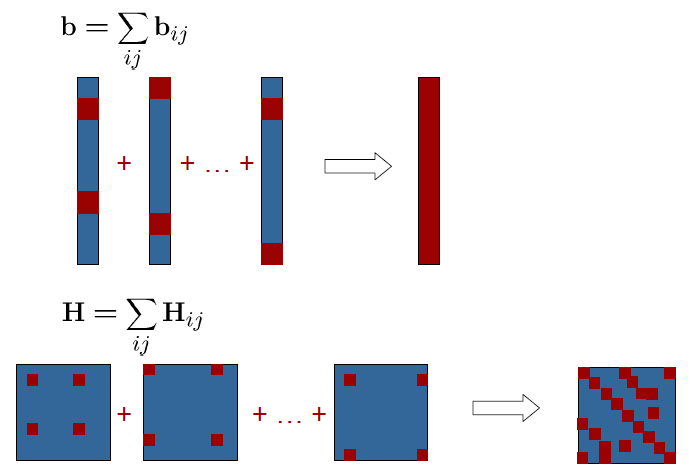
SLAM优化函数中,H矩阵和B矩阵是稀疏的,因此可以针对性的进行一些算法设计来加速求解。
H和B为什么是稀疏的,直观解释如下所示:
基于SVD分解计算旋转和平移向量
点云配准任务详见pcl中的点云配准
如果可以得到两个点云之间的同名点对,那么就可以计算出旋转和平移向量的闭式解,以二维点集之间的相对变换为例进行解释:
- 首先对原始的点云进行归一化操作,即减去对应质心点的坐标,得到\(\tilde{\mathbf{X}}, \tilde{\mathbf{Y}}\);
\[ \tilde{x}=x_i-\bar{x},\tilde{y}=y_i-\bar{y},i=1,...,N \]
- 计算加权协方差矩阵;
\[ \mathbf{H}=\tilde{\mathbf{X}}^{T} \mathbf{E} \tilde{\mathbf{Y}} \]
其中\(\mathbf{E}=\mbox{diag}(e_1,e_2,...,e_N)\).
- 对\(\mathbf{H}\)做SVD分解即可计算从\(\mathbf{X}\)到\(\mathbf{Y}\)的旋转矩阵;
\[ \begin{align} [\mathbf{U},\mathbf{S},\mathbf{V}] &= \mbox{SVD}(\mathbf{H}) \\ \hat{\mathbf{R}} &= \mathbf{V} \left[\begin{array}{ccc} 1 &0 &0 \\ 0 &1 &0 \\ 0 &0 &\mbox{det}(\mathbf{V}\mathbf{U}^{T}) \end{array} \right] \mathbf{U}^{T} \end{align} \]
其中det()是行列式。
- 最后再计算平移向量;
\[ \hat{\mathbf{t}}=\bar{y}-\hat{\mathbf{R}\bar{x}} \]
至于背后的数学推导,见这里。
PCL中的代码解释,详见另外一篇博客,或者文章《Least-Squares Rigid Motion Using SVD》。
坐标变换
常用地理坐标系
- WGS84:World Geodetic System,世界大地测量系统,国外图商采用,例如:谷歌地图、Open Street Map(OSM);
- GCJ02:国测局坐标系,又称火星坐标系,对于WGS84坐标系加密而成,国内图商采用,例如:高德地图、腾讯地图;
- BD09:百度地图坐标系,对于GCJ02坐标系加密而成;
- CGCS2000:China Geodetic Coordinate System 2000,又称EPSG4490国家大地测量系统,国家2000坐标系;
WGS84和GCJ02和BD09坐标系转换,可以通过GeoConvert,coordtransform,gcoord实现。
一个疑问,既然是加密之后才有了GCJ02和BD09,那么为什么代码还可以直接使用开源代码实现转换呢?那不是相当于没加密?其实是近似的转换,转换多了之后就不准确了。对于没有测绘资质的人来说,拿到的坐标都是偏离过的。
1 | |
地图投影
通用横轴墨卡托(Universal Transverse Mercator,UTM)投影是一种地图投影方法,将经纬度转换为二维笛卡尔坐标表示。UTM坐标是一种水平位置表示方式,忽略了海拔高度,将地球建模为完美椭球体。
- 开源代码
mgrs-Converting to and from MGRS and Decimal Degrees。
- 在线可视化工具
UTM-WGS84 坐标转换-支持在 UTM 坐标系统和 WGS84 经纬度坐标系统之间进行快速转换。